投入式液位计在大坝监测的应用
北斗大坝形变监没是北斗卫星高精度定位的一种具体应用,整个系统要做一测量,需要一整套的设备的协同才能实现,其中投入式液位计等用于液位测量的仪表的作用也不可小觑,主要作用也是通过水位的变化来测量大坝的形变。本文主要介绍北斗大坝形变监测系统的组成结构、数据处理流程,以及使用定位数据处理误差改正模式来提高监测精度的方法。采集的北斗卫星数据通过通信网络送到数据处理中心,解算数据得到监测点和基准站的相对位移,从而达到监测大坝形变的目的。
引言
北斗大坝形变监测主要采用北斗差分定位方式,在一个已知经纬度等信息的基准站设置高精度北斗接收机,在大坝坝体上设置的若十高精度北斗接收机等设备作为监测点,同时观测相同的北斗卫星,获取相应的北斗卫星数据。采集的北斗卫星数据通过通信网络送到数据处理中心,解算数据得到监测点和基准站的相对位移,从而达到监测大坝形变的目的。
1北斗大坝形变监测系统组成
北斗大坝形变监测系统由数据采集子系统、通信网络、数据分析处理中心、远程监控平台等构成。
1.1数据采集子系统
数据采集子系统包括基准站和监测点两部分。数据采集子系统功能是:采集基准站及监测站的定位信息,并定时向数据处理中心发送采集的数据。
基准站是整个监测系统的基准参考,需建在稳定的基岩上,基准站安装高精度北斗接收机采集卫星观测数据。监测站分布在整个形变区域特征点上,即在坝体预理多个高精度北斗接收机、电子数据采集主机和电子传感器作为监测站。
1.1.1数据采集主机
数据采集主机特点如下:
①高精度卫星接收机一次输出的数据量较大,要求缓存较大,通信链路断时需要木地保存大量数据,要求外接TF存储器作为北斗数据存储器。MCU选用ST公司的一款(Cortex-M3芯片。
②数据采集主机与高精度北斗卫星接收机同在一个金属壳体内部,连接高精度北斗接收机的串口不需防雷处理,采用普通串口即可。RT1 RS232连接北斗接收}JL,采集北斗数据。
③隔离485接口主要连接电子式水平传感器、垂直位移传感器,485接口水位计、485接口雨量传感器、土层湿度传感器等。
④带防护装置的网口用于连接通信网络,向数据处理中心发送采集的北斗定位数据和外部传感数据。
⑤ 4-20mA模拟信号输入口用于连接4-20mA输出接口的雨量传感器、水位计、土层湿度传感器等。输入信号经过电流/电压变换后送入MCU的A/D转换器进行数字化处理。
⑥许多翻斗式雨量传感器等输出的是脉冲信号,可以通过计数脉冲输入口接入。计数脉冲经过普通MCU的I/ O口输入,结合内部定时器广计数器统计雨量。
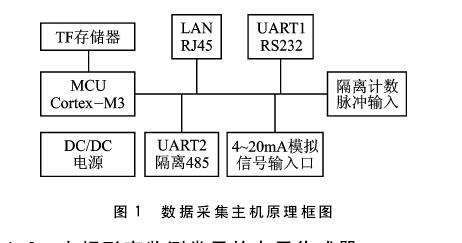
数据采集主机原理框图如图1所示。
图1数据采集主机原理框图
1.1.2大坝形变监测常用的电子传感器
(1)水位计
水位计种类比较多,有投入式液位计、浮子式水位计、超声波水位计、压力式水位计、等,各有特点,使用时要根据坝体周围的具体情况选用。
①浮子式水位计其原理是由浮子感应水位的升降。有用机械方式直接使浮子传动记录结构的普通水位计,有把浮子提供的转角量转换成增量电脉冲或二进制编码脉冲作远距离传输的电传、数传水位计,还有由微型浮子和许多十簧管组成的数字传感水位计等。应用较广的是机械式浮子水位计。应用浮子式水位计需有测井设备,只适合于岸坡稳定、河床冲淤很小的低含沙量河段使用。
②超声波水位计是反射式水位计的一种,应用声波遇不同介面反射的原理来测定水位。分为气介式和水介式两类。气介式以空气为声波的传播介质,换能器置于水面上方,由水面反射声波,根据回波时间可计算并显不出水位。仪器不接触水体,*摆脱水中泥沙、流速冲击和水草等不利因素的影响。水介式是将换能器安装在河底,向水面发射声波,也不需要建测井。两种水位计均可用电缆传输至室内显不或存储记录。
③压力式水位计的工作原理是测量水压力,推算水位。其特点是无需建静水测井,可以将传感器固定在河底,用引压管消除大气压力,从而直接测得水位。压力式水位计有两类:一类为气泡型,在引压管中不断输气,用自动调节的压力天平将水压力转换成机械转角量,从而带动记录机构;另一类为电测型,它应用固态压阻器件作传感器,可直接将水压力转变成电压模量或频率量输出,然后用导线传输至岸上进行处理和记录。
④跟踪式水位计又称接触式水位计,利用重锤上的电测针接触水面发出电信号,使电机正转或逆转,随时跟踪水面点的位置,从而测定水位。一般在较陡岸坡上架设铁管,悬锤和悬索在管道中升降,驱动记录或信号装置。铁管进水口需有沉沙和净水设施。
⑤投入式液位计是基于所测液体静压与该液体高度成正比的原理,采用扩散硅或陶瓷敏感元件的压阻效应,将静压转成电信号。经过温度补偿和线性校正,转换成4-20 mA标准电流信号输出。投入式液位计的传感器部分可直接投入到液体中,变送器部分可用法兰或支架固定,安装使用较为方便。
考虑数据采集主机用以连接传感器的接口只有485接口和4-20 mA输入接口,因此选用水位时应考虑接口匹配。
(2)雨量传感器
常用的雨量传感器是翻斗型雨量传感器,主要工作原理是承水口收集的雨水,经过上筒(漏斗)注入计量翻斗,翻斗是用工程塑料注射成型的,由中间隔板分成两个等容积的三角斗室。它是一个机械双稳态结构,当一个斗室接水时,另一个斗室处于等待状态。当所接雨水容积达到预定值0. 4 mm(假定测量精度为0. 4 mm)时,由于重力作用使自己翻倒,处于等待状态,另一个斗室处于接水工作状态。当其接水量达到预定值时,又自己翻倒,处于等待状态。在翻斗测壁上装有磁钢,它随翻斗翻动时从十式舌簧管旁扫描,使十式舌簧管通断。即翻斗每翻倒一次,十式舌簧管便接通一次送出一个开关信号(脉冲信号)。
翻斗式雨量传感器直接通过数据采集主机的计数脉冲输入接口传送脉冲数据。
雨量信息采集可以不使用雨量传感器,直接采用雨量监测站通过无线UPRS网络向数据处理中心传送气象数据。
(3)位移传感器
高精度北斗卫星接收机木身可以进行水平和垂直位移测量,考虑成木及安装方便等因素,时常将高精度北斗卫星接收机与电子位移传感器结合使用。位移传感器包含水平位移和垂直位移传感器,主要有电感式、电容式、光电式、霍尔式、涡流式位移传感器,激光位移传感器使用比较方便,不用其他外部设备,可以输出数字和模拟信号,可以与数据采集主机的485接口或4-20 mA输入接口相连接。
1.2数据处理与分析中心
数据处理中心负责接收处理基准站和监测点北斗数据,数据处理中心将星历、原始观测数据如卫星号、伪距、伪距标准差、载波相位、载波相位差、瞬时载波多普勒频率、载噪比、连续跟踪秒数等数据采用双差解算模式,在优化载波相位差分数据处理方法的基础上,同时处理基准站和监测站载波相位数据,得到的监测点相对于基准点的形变量,从而获取整个坝体区域的形变信息。
数据处理中心主要由通信网络、数据处理软件、服务器等组成。
1.3远程监控中心
远程监控中心可与数据处理中心并置,远程监控中心是整个系统的神经中枢,负责监测信息的处理,融合水文、气象等信息,组成大坝形变监测信息自动处理与应急预警信息平台。
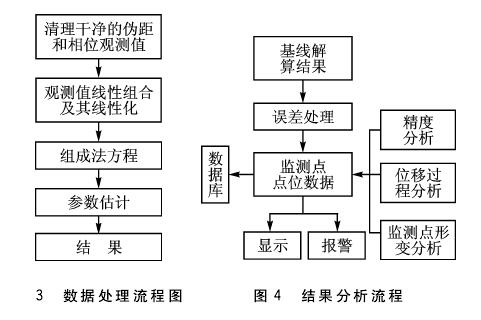
2北斗数据处理流程
北斗数据处理主要可分为数据清理、数据处理、结果分析等几个流程,具体如图z一图4所不。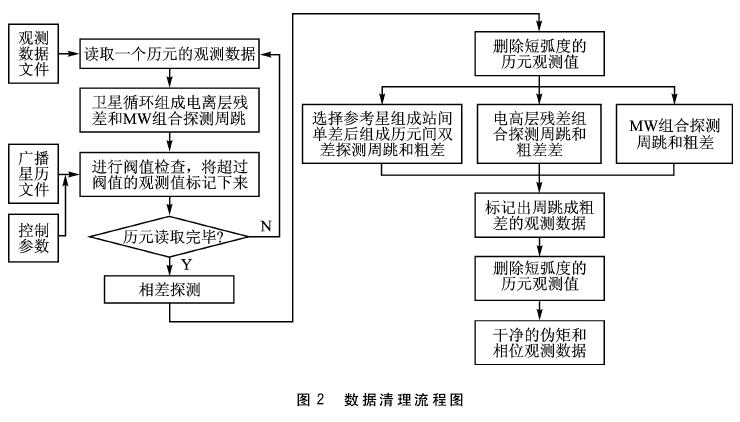
3数据处理误差改正模型
在相对定位中,涉及的关键数据处理过程是基线解算,基线解算可以分为:长基线、中长基线和短基线三种类型。这里介绍短基线数据处理中相关的误差影响因素川、误差消除或削弱的方法。
3.1短基线的卫星星历误差影响
由卫星星历所给出的卫星位置与实际卫星位置的差值称为卫星星历误差。星历误差的大小取决于卫星定轨系统的质量,如定轨站的数量及其地理分布、观测值的数量及其精度、定轨的数学力学模型和定轨软件的完善程度等。在一般工程应用中,特别是北斗短基线的数据处理中,由于基线较短,通常采用广播星历即可满足应用的要求。
在相对定位中,卫星的星历误差对解算精度影响较小,利用广播星历进行相对定位时,即使基线长度达到56 km时,其误差影响仍然保持在1 cm以内,故对于短基线(10 km以内)来说,其误差的影响非常小,可以忽略不计。
3.2短基线的卫星钟差与接收机钟差影响[[3]
卫星上计时工具是高精度的原子钟,但卫星钟也不可避免地会产生误差,这种误差既包含系统性的偏差(如钟差、钟速、钟漂等),也包括随机性质的偏差。系统误差可以通过检验和对比来确定,并通过相应的数学物理模型加以改正;而随机误差只能通过钟的稳定度来描述其统计特性,无法确定其具体的大小和方向。
与卫星钟一样,接收机钟也会产生误差,接收机钟为石英钟,接收机钟差较卫星钟差来讲要显著一些。该项误差主要取决于钟的质量,与使用的环境也有一定的关系。它对测码伪距观测值和载波相位观测值的影响是相同的。
某一时刻t,的钟差一般可以表不为:pt一「」+a, }t一」)+a9 }t一」)+{y(t)dt式中:a〔为t〔时刻该钟的钟差;a、为t,时刻该钟的钟速;a为L}时刻该钟的加速度的一半。
利用载波相位观测值进行相对定位时,根据卫星导航电文所给的卫星钟参数而求得的卫星钟差不能作为后的值,在建立观测方程时必须将其视为米知参数。由于进行同步观测时,不同的观测值中会包含有同样的钟差影响,故可以通过观测方程相减来消除这些钟差的影响。假设同步观测n颗卫星,在短基线(甚至长基线)数据处理中,首先选择一个卫星作为基准星,并将其余的(n-1)个观测方程分别与基准星观测方程相减,那么在这((n-1)个求差以后的新观测方程中,某一对应的时刻t0接收机的钟差将被消除。
在两站之间,进行站间单差就可以将卫星钟差消除。把不同时刻,不同站间的钟差视为一个独立的米知参数,通过相应的观测方程相减来消除这些钟差的影响,后再组成法方程。
3.3短基线的电离层延迟影响
卫星电磁波信号在穿过电离层时,传播速度会产生变化,变化程度主要取决于载波信号频率和电离层中的电子密度;传播路径也会发生略微的弯曲,由此而产生的误差影响称为电离层延迟误差。
消除和削弱电离层延迟的方法有很多,比如模型法,包括Bent模型、参考电离层模型}Klobuchar模型和双频改正模型等。还有用实测双频观测值来建立电离层延迟改正模型等,在不同的观测条件下采用相应的模型可以较好地削弱电离层延迟影响万’〕。但目前常用的为采用双频观测值消除电离层影响,利用双频观测值消除一阶项电离层影响后,剩余的高阶项影响对于短基线来说一般很小,可忽略不计。
3.4短基线的对流层延迟影响
对流层延迟一般泛指中性大气层对电磁波的折射。中性大气层包括对流层和平流层,大约是大气层从地面向上40 km部分。由于折射的80%发生在对流层,所以通常也叫做对流层折射延迟。对流层对于15 UHz的射电频率呈中性,信号传播产生非色散延迟,使电磁波传播路径比几何距离长。电磁波在对流层的传播速度只与大气的折射频率及电磁波传播方向有关,与电磁波频率无关。
对流层折射影响通常表不为天顶方向的对流层折射量和与高度角相关的投影函数M的乘积。并且对流层延迟的90%是由大气中十燥气体引起的,称为十分量;其余10%是由水汽引起的,称为湿分量。因此,对流层延迟可用天顶方向的十、湿分量延迟及其相应的投影函数表示: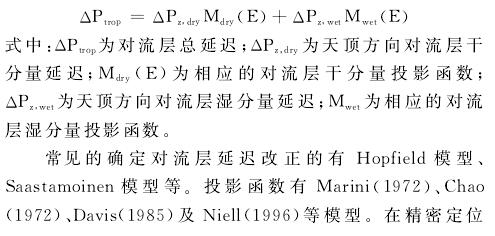
中经常采用}1ie11模型,}1ie11模型除了考虑纬度因素外,还考虑了对流层的季节性变化和高度不同的影响,其不包含气象元素,不会受气象元素观测误差的影响,其没有考虑实测的气象数据,也能与无线电探空数据计算出的投影模型相符合。对流层影响利用模型改正后,十分量部分的改正精度可以达到cm级,而湿分量部分的残余影响还比较大,在精密定位中,必须利用参数估计的方法将对流层残余影响当作一个参数进行估计。
大坝形变监测精度要求达到mm级,需要对以上几个误差进行建模处理,方能满足要求。
结语
北斗高精度大坝形变监测主要是利用连续运行卫星定位参考站技术、卫星定位数据高精度处理技术、物联网技术、通信技术及信息处理技术等,实现对大坝形变的全天候、自动化、高精度、高可靠监测,具有要求通视的常规测绘技术的优势。
版权与免责声明:凡本网注明“来源:全球工厂网”的所有作品,均为浙江兴旺宝明通网络有限公司-全球工厂网合法拥有版权或有权使用的作品,未经本网授权不得转载、摘编或利用其它方式使用上述作品。已经本网授权使用作品的,应在授权范围内使用,并注明“来源:全球工厂网”。违反上述声明者,本网将追究其相关法律责任。 本网转载并注明自其它来源(非全球工厂网)的作品,目的在于传递更多信息,并不代表本网赞同其观点或和对其真实性负责,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品第一来源,并自负版权等法律责任。 如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
展开全部